

Path planning and transportation task assignment algorithm for multiple unmanned ground vehicles in soil contaminated site
-
摘要:
为提升我国土壤生物修复技术智能化装备水平,以某一污染严重的焦化厂为研究环境,针对焦化厂的地形地貌特点,采用深度双Q网络(DDQN)和蚁群优化算法(ACO)建立多无人车路径规划和任务分配系统,实现土壤修复过程中污染土壤的安全、精准运输,提高污染土壤运输的效率。结果表明:基于DDQN和ACO的多无人车运输系统具备良好的路径规划能力,与其他基于简单的线性距离或基于贪婪算法得到的任务分配策略相比,基于实际系统时间开销的ACO任务分配算法在不同装载量情况下均可实现无人车系统时间开销的稳定降低。
Abstract:In order to improve the intelligent equipment level of bioremediation technology, a heavily polluted coke plant was taken as the research environment, and the double deep Q network (DDQN) and ant colony optimization algorithm (ACO) were used to establish a multiple unmanned ground vehicles (multi-UGV) path planning and task assignment system for the topographical features of the coke plant to achieve safe and accurate transportation of contaminated soil in the soil remediation process and improve the efficiency of contaminated soil transportation. The results showed that the multi-UGV transportation system based on DDQN and ACO had good path planning capability, and the ACO task assignment algorithm based on the actual system time cost could achieve a stable reduction of UGV system time cost under different loading quantities compared with other task assignment strategies obtained based on simple linear distance or based on the greedy algorithm.
-
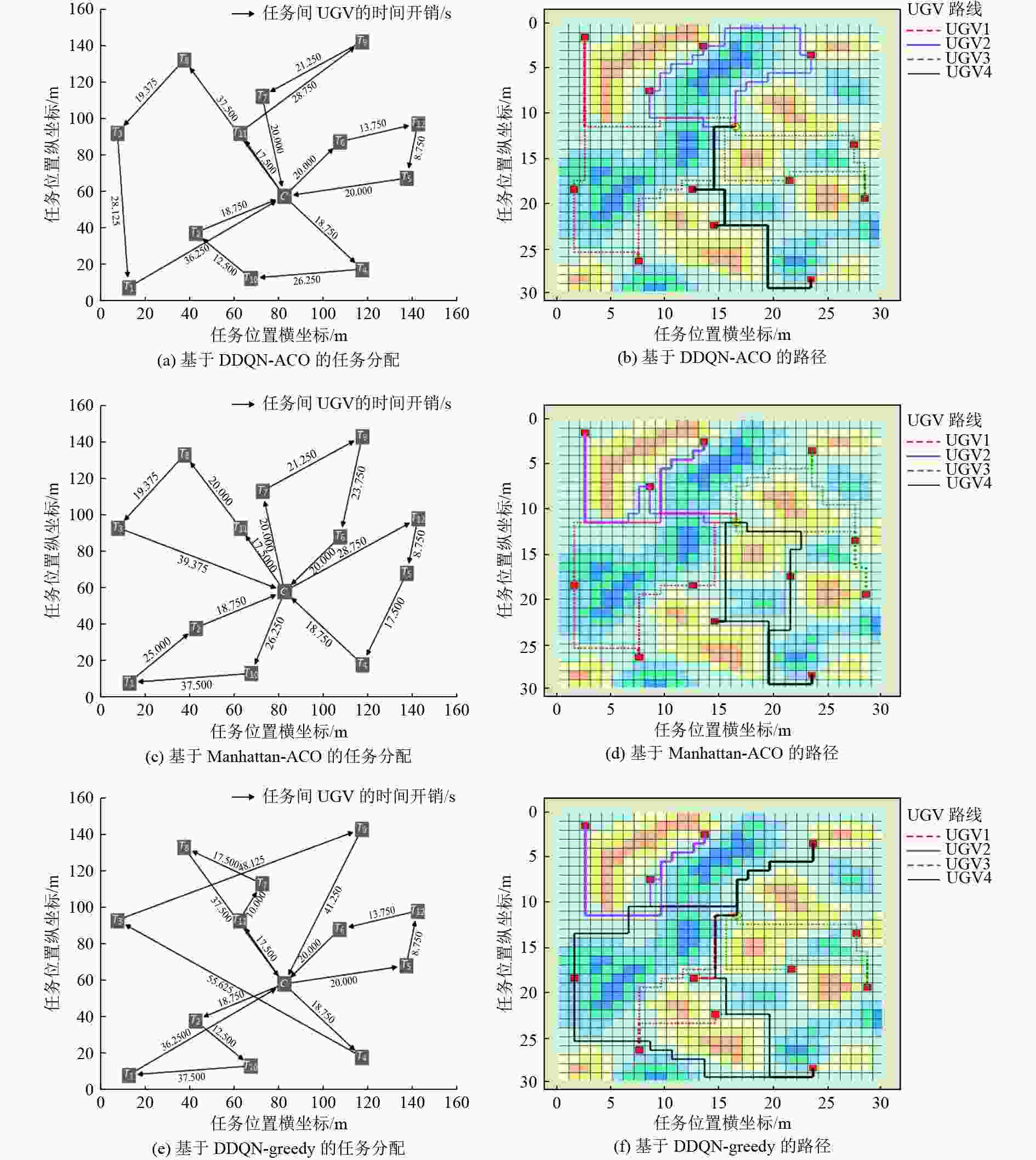
图 5 基于多种算法的任务分配和路径规划情况
Figure 5. Task assignment and path planning based on multiple algorithms
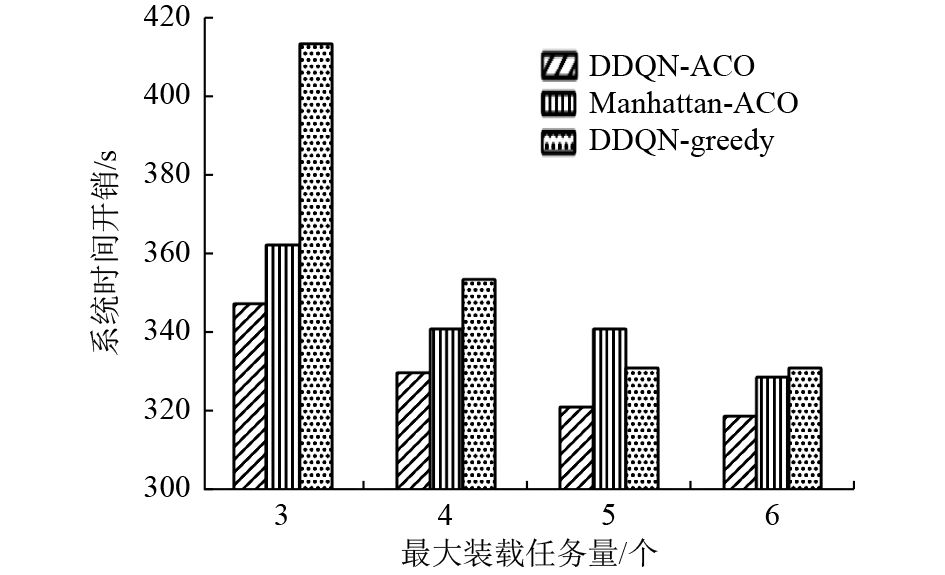
图 6 不同UGV最大装载任务量对系统时间开销的影响
Figure 6. Impact of different UGV maximum loading tasks on system time cost
表 1 神经网络的参数
Table 1. Parameters of neural network
类型 参数值 折扣因子 0.9 学习率 0.002 5 目标参数更新频率 300 批处理样本大小 128 初始探索值 1.00 最终探索值 0.05 探索递减量 0.000 025 记忆库容量 20 000  下载: 导出CSV
下载: 导出CSV
表 2 不同算法下的任务分配结果
Table 2. Task assignment results under different algorithms
算法 系统时间开销/s 任务分配结果 DDQN-ACO 347.50 C-T8-T3-T1-C C-T4-T10-T2-C C-T6-T12-T5-C C-T11-T9-T7-C Manhattan-ACO 362.50 C-T11-T8-T3-C C-T10-T1-T2-C C-T12-T5-T4-C C-T7-T9-T6-C DDQN-greedy 413.75 C-T11-T7-T8-C C-T2-T10-T1-C C-T5-T12-T6-C C-T4-T3-T9-C
下载: 导出CSV
-
[1] 吴琳琳, 吴荣山, 郭玉婷, 等.污染场地挥发性有机物蒸气入侵建筑物关键参数的研究[J]. 环境工程技术学报,2023,13(2):881-888.WU L L, WU R S, GUO Y T, et al. Research on the key building parameters applied in the vapor intrusion pathway of VOCs in contaminated sites[J]. Journal of Environmental Engineering Technology,2023,13(2):881-888. [2] 黄湘云, 钟文军, 刘训杰, 等. 基于环境DNA的复合污染土壤生物评价和胁迫诊断[J]. 环境科学,2023,44(7):4131-4141 .HUANG X Y, ZHONG W J, LIU X J, et al. Biological evaluation and key stress factor diagnosis of compound contaminated soil based on environmental DNA[J]. Environmental Science.2023,44(7):4131-4141. [3] 杨显辉, 刘园, 彭园花.浅析工业园区土壤污染隐患排查的工作方法[J]. 当代化工研究,2022,117(16):77-79. doi: 10.3969/j.issn.1672-8114.2022.16.026YANG X H, LIU Y, PENG Y H. Analysis on the working methods of soil pollution hidden danger investigation in industrial parks[J]. Modern Chemical Research,2022,117(16):77-79. doi: 10.3969/j.issn.1672-8114.2022.16.026 [4] 王文兵, 李春阳, 董纤凌, 等.双碳背景下污染场地修复策略与技术前景[J]. 环境工程学报,2023,17(1):188-196.WANG W B, LI C Y, DONG Q L, et al. Strategies and technology prospects for contaminated site remediation in carbon peak and carbon neutrality vision[J]. Chinese Journal of Environmental Engineering,2023,17(1):188-196. [5] 籍龙杰, 张婧卓, 陈梦巧等.污染土壤修复中心的发展现状及方向展望[J]. 化工环保,2023,42(2):125-133.JI L J, ZHANG J Z, CHEN M Q, et al. Development status and direction of contaminated soil remediation center[J]. Environmental Protection of Chemical Industry,2023,42(2):125-133. [6] 魏潇淑, 高红杰, 陈远航, 等.人工智能技术在水污染治理领域的研究进展[J]. 环境工程技术学报,2022,12(6):2057-2063. doi: 10.12153/j.issn.1674-991X.20210638WEI X S, GAO H J, CHEN Y H, et al. Research progress of artificial intelligence technology in the field of water pollution control[J]. Journal of Environmental Engineering Technology,2022,12(6):2057-2063. doi: 10.12153/j.issn.1674-991X.20210638 [7] 刘柏音, 刘孝富, 孙启宏, 等.基于物联网的固定源大气污染物排放现场执法监管信息系统设计与应用[J]. 环境工程技术学报,2022,12(5):1687-1694.LIU B Y, LIU X F, SUN Q H, et al. Design and application of on-site law enforcement and supervision information system for air pollutants emission from stationary sources based on IoT[J]. Journal of Environmental Engineering Technology,2022,12(5):1687-1694. [8] 戎艳青, 王林芳, 肖艳艳, 等.不同模型在焦化厂PAHs健康风险评估中的应用[J]. 环境科学与技术,2021,44(8):217-225.RONG Y Q, WANG L F, XIAO Y Y, et al. Evaluation on models applied to health risk assessment of PAHs in coking plant[J]. Environmental Science & Technology,2021,44(8):217-225. [9] 赵丹, 廖晓勇, 阎秀兰, 等.不同化学氧化剂对焦化污染场地多环芳烃的修复效果[J]. 环境科学,2011,32(3):857-863.ZHAO D, LIAO X Y, YAN X L, et al. Chemical oxidants for remediation of soils contaminated with polycyclic aromatic hydrocarbons at a coking site[J]. Environmental Science,2011,32(3):857-863. [10] SUN H H, ZHANG W J, YU R X, et al. Motion planning for mobile robots: focusing on deep reinforcement learning: a systematic review[J]. IEEE Access,2021,9:69061-69081. doi: 10.1109/ACCESS.2021.3076530 [11] LI S D, XU X, ZUO L. Task assignment of multi-robot systems based on improved genetic algorithms[C]//2015 IEEE International Conference on Mechatronics and Automation. Beijing, China, 2015: 1430-1435. [12] HU X Z, ZHOU J W, AI W D. A hybrid path planning algorithm based on Floyd and A* theory[C]//2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference. Chongqing, China, 2021: 2055-2060. [13] YAO Q F, ZHENG Z Y, QI L, et al. Path planning method with improved artificial potential field: a reinforcement learning perspective[J]. IEEE Access,2020,8:135513-135523. doi: 10.1109/ACCESS.2020.3011211 [14] 岳春擂, 黄俊, 邓乐乐.改进蚁群算法在AGV路径规划上的研究[J]. 计算机工程与设计,2022,43(9):2533-2541.YUE C L, HUANG J, DENG L L. Research on improved ant colony algorithm in AGV path planning[J]. Computer Engineering and Design,2022,43(9):2533-2541. [15] MEERZA S I A, ISLAM M, UZZAL M M. Q-learning based particle swarm optimization algorithm for optimal path planning of swarm of mobile robots[C]//2019 1st International Conference on Advances in Science, Engineering and Robotics Technology. Dhaka, Bangladesh, 2019: 1-5. [16] 余娜娜, 李铁克, 张文新, 等. 自动分拣仓库中多载量AGV调度与路径规划算法[J/OL]. 计算机集成制造系统. [2023-08-19]. http://kns.cnki.net/kcms/detail/11.5946.TP.20220927.1021.002.html.YU N N, LI T K, ZHANGG W X, et al. Multi-load AGVs scheduling and routing algorithm in automatic sorting warehouse[J/OL]. Computer Integrated Manufacturing Systems. [2023-08-19]. http://kns.cnki.net/kcms/detail/11.5946.TP.20220927.1021.002.html. [17] KIRAN B R, SOBH I, TALPAERT V, et al. Deep reinforcement learning for autonomous driving: a survey[J]. IEEE Transactions on Intelligent Transportation Systems,2021,23(6):4909-4926. [18] 张永梅, 赵家瑞, 吴爱燕.好奇心驱动的深度强化学习机器人路径规划算法[J]. 科学技术与工程,2022,22(25):11075-11083.ZHANG Y M, ZHAO J R, WU A Y. Robot path planning algorithm based on curiosity-driven deep reinforcement learning[J]. Science Technology and Engineering,2022,22(25):11075-11083. [19] FAUADI M H F B M, YAHAYA S H, MURATA T. Intelligent combinatorial auctions of decentralized task assignment for AGV with multiple loading capacity[J]. IEEJ Transactions on Electrical and Electronic Engineering,2013,8(4):371-379. doi: 10.1002/tee.21868 [20] JIANG Y, WANG D B, BAI T T, et al. Multi-UAV objective assignment using hungarian fusion genetic algorithm[J]. IEEE Access,2022,10:43013-43021. doi: 10.1109/ACCESS.2022.3168359 [21] ELHOSENY M, THARWAT A, HASSANIEN A E. Bezier curve based path planning in a dynamic field using modified genetic algorithm[J]. Journal of Computational Science, 2018, 25:339-350. [22] COLORNI A, DORIGO M, MANIEZZO V, et al. Distributed optimization by ant colonies[C]//Processings of the 1st European Conference on Artificial Life. Paris: The MIT Press, 1991: 134-142. [23] HUANG Z M, CHEN W N, LI W, et al. Ant colony evacuation planner: an ant colony system with incremental flow assignment for multipath crowd evacuation[J]. IEEE Transactions on Cybernetics,2021,51(11):5559-557. doi: 10.1109/TCYB.2020.3013271 [24] 张润发, 邱建龙, 郭明等.基于改进2-opt蚁群算法的生鲜车辆路径优化[J]. 数学的实践与认识,2021,51(24):160-170. doi: 10.3969/j.issn.1000-0984.2021.24.sxdsjyrs202124017ZHANG R F, QIU J L, GUO M, et al. Fresh vehicle routing optimization based on improved 2-opt ant colony algorithm[J]. Mathematics in practice and theory,2021,51(24):160-170. doi: 10.3969/j.issn.1000-0984.2021.24.sxdsjyrs202124017 [25] 秦东各, 王长坤.一种基于2-opt算法的混合型蚁群算法[J]. 工业控制计算机,2018,31(1):98-100. doi: 10.3969/j.issn.1001-182X.2018.01.041QIN D G, WANG C K. A Hybrid ant colony algorithm based on 2-opt algorithm[J]. Industrial Control Computer,2018,31(1):98-100. doi: 10.3969/j.issn.1001-182X.2018.01.041 [26] 张朋, 高延辉, 张煜, 等.顺岸式边装卸自动化码头人工智能运输机器人(ART)动态泊车设计[J]. 水运工程,2022,596(6):184-189.ZHANG P, GAO Y H, ZHANG Y, et al. Dynamic parking design of artificial intelligence robots of transportation( ART) in automated container terminals with alongshore side-loading/unloading technology[J]. Port & Waterway Engineering,2022,596(6):184-189. [27] 齐海强, 张晋塬, 王兴.火车车辆轮轴智能运输机器人的设计[J]. 内蒙古科技与经济,2022,509(19):102-105. [28] 任文清, 刘孝军. 煤矿主运输系统智能巡检机器人研究与设计[J]. 煤炭科学技术, 2022, 50(增刊2): 372-378.REN W Q, LIU X J. Design and application of intelligent patrol system for coal mine main transportation system [J]. Coal Science and Technology, 2022, 50(Suppl 2): 372-378. -

 下载:
下载:






 点击查看大图
点击查看大图

计量
- 文章访问数: 261
- HTML全文浏览量: 122
- PDF下载量: 42
- 被引次数: 0